装满咖啡粉的气球是理想的机器手【已添加视频】
人类的手非常灵活,抓、放、挪各种物体都很灵活,这些动作机器人很难做到。
来自康奈尔大学、芝加哥大学和iRobot 公司的一群科研人员则另辟蹊径,绕开了传统上让机器人模仿人手的思维模式,而是选择了
用装满咖啡粉的气球充当机器手。从而制作出一种几乎可以抓起任何物体的全能机器手。
人类的手非常灵活,抓、放、挪各种物体都很灵活,这些动作机器人很难做到。
来自康奈尔大学、芝加哥大学和iRobot 公司的一群科研人员则另辟蹊径,绕开了传统上让机器人模仿人手的思维模式,而是选择了
用装满咖啡粉的气球充当机器手。从而制作出一种几乎可以抓起任何物体的全能机器手。
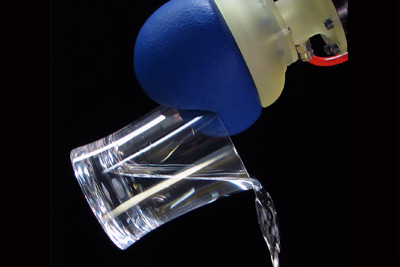
工作原理如下:把一个装满咖啡粉的普通气球固定在机器人胳膊上。当机器手压在受力物体上时会发生形变,然后用真空吸走气球里面的空气,这样机器手就可以抓牢物体。当释放真空以后,气球会再次变软,然后机器手就会松手。
气球里面的咖啡粉好比是很多个小齿轮,在没有受到挤压时,它们可以来回滚动。当这些颗粒同时受到很小的压力时,齿轮开始啮合,然后咖啡粉会变得非常坚硬。
理论上颗粒材料都可以用作填充物,比如米粉、面粉、乃至轮胎颗粒等。这些科研人员之所以选择咖啡粉是因其质量比较轻,而且颗粒之间的挤压效果很好。
这种机器手轻而易举就可以抓起生鸡蛋和硬币,这对以前的机器人来说非常困难。
以下是视频介绍: