在乌镇世界互联网大会体验百度无人驾驶车
在今年的世界互联网大会上,百度在乌镇设置了一座无人驾驶体验站,这座体验站的车程全长为3.16Km。该体验站长8米,宽2.8米,最高点3米,占地22.4平方米,世界互联网大会开幕当天,百度共投放了18辆无人驾驶车供乘客试乘。
在现场我们看到,百度将无人驾驶汽车大脑系统命名为“云骁”无人驾驶,如下图,以下是搭载了百度无人驾驶大脑、并进行了相应改造的车辆,车型分别为奇瑞EQ和北京汽车EU260、以及比亚迪秦(纯电动,未入镜)。百度工作人员告诉36氪,之所以选择改造好几款车型,是为了展示百度无人驾驶系统对各类车型的普遍适用性。
我们能看到,百度无人驾驶车分别在车顶加装了一个64线Velodyne激光雷达,在车后、车顶两侧分别加装了1个16线激光雷达(共三个,与车身呈一定角度,仔细看下图左一可以看到)此外,百度还加装了GPS增强天线,与64线激光雷达一起用于车辆定位。此外,百度还在车辆面向道路前方的位置加装了摄像头,用于捕捉红绿灯、道路标志标牌等信息——见下图左一的两个小窟窿。在车辆的格栅位置,百度还为其加装了一个毫米波雷达。另外百度还搭载了用于处理感知数据的计算中心。并且,此次百度无人驾驶车的操作是基于百度高精度地图实现。

百度表示,此次乌镇无人车测试和试运营,是国内首次在全开放城市道路上行驶,体验全程3.16公里,将会经过三个红绿灯以及一次调头,途中可能会面临到人车混行、电瓶车穿行等多种路况。运行过程中,无人车使用的L4级自动驾驶技术能够实现红绿灯识别、行人避让以及超车并线等。
不过,虽说这是百度首次在全开放的城市道路上进行自动驾驶,但事实上这里道路标线整齐、清晰,同时由于乌镇进行交通管制的原因,导致车辆面临的道路环境其实并不复杂。
先来说说我的乘坐体验:
首先,车是自动驾驶汽车,但为了安全考虑,百度依然给每个车辆配备了一位司机(安全员)和一名来自百度的技术讲解员,试乘人员可以坐在副驾驶位置或是后排。
当时我乘坐的位置是副驾驶,副驾驶前方有一个用于演示的大屏幕。在系上安全带后,司机开着车辆到达无人驾驶体验路线的起始点,这时,司机会点击屏幕上的蓝色按钮位置,车辆会提示进行“安全自检”,自检完毕后,司机再次点击蓝色按钮(上面会有文字指示),然后车辆就开始无人驾驶了。

司机全程虚握方向盘,同时能看到路况相对简单
在无人驾驶的过程中,司机完全没有介入操作,但会全程用手虚握方向盘(不接触方向盘,只虚拢着方向盘),以保证能随时应对各种突发事故。
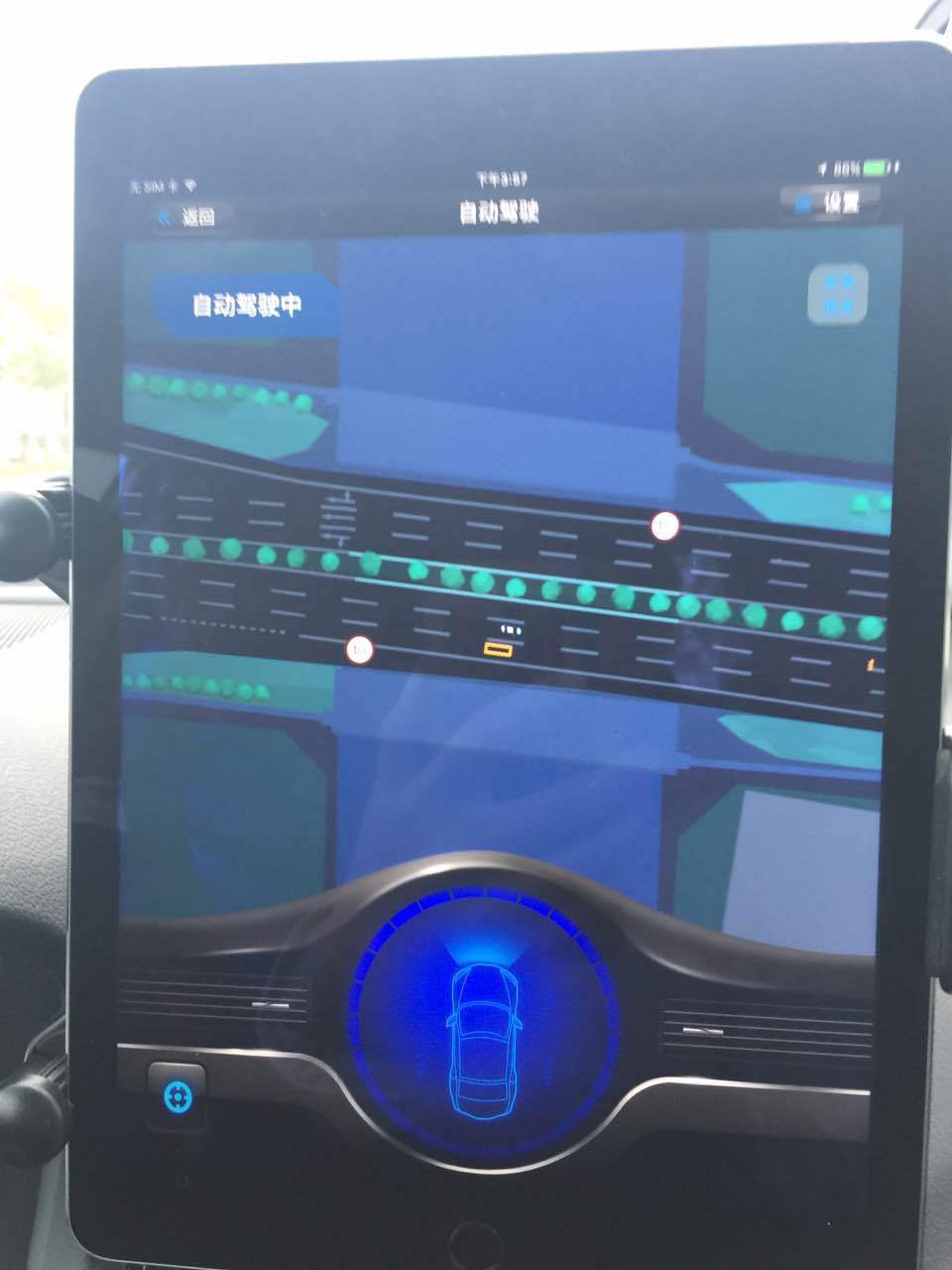
副驾驶前方的屏幕
如上图,以上是车辆在无人驾驶模式下,百度无人车对自身和周边环境做的一个模拟图显示,百度无人驾驶车能够精确到车道,可以将正反向的三条车道清晰地标示出来,并且还会标记出道路的限速标牌。从上图中我们看到,我们的那辆百度无人驾驶汽车行驶在中间车道中(是百度无人车的设定,即常规情况下在中间车道行驶),车辆右侧的小黄框是移动的障碍物(行人、摩托车、三轮车、电瓶车、汽车都会被识别为小黄框)。
也正是我在拍摄上图时,百度无人驾驶车发生了第一次并线,它自行打左转向灯,并到了靠近绿化带的车道,之后又再次打右转向灯,并回了中间车道。此时,百度无人车的右侧行驶着一辆外卖三轮车。百度无人驾驶车对其做了一次“挺大题小做”的闪避。
后来,百度工作人员随后对36氪做出了解释,百度无人车目前能够精确探测周围障碍物,能够了解该障碍物在此刻的状态(行驶速度、距离、方向),但由于百度无人驾驶目前尚未整合V2V和V2X技术(即车辆和车辆之间实现通讯,车辆和基础设施(Infrastructure,V2I),因而它还不能判断其他车辆接下来要采取的动作(会突然失控?并线?还是强行超车?)。为安全起见,百度无人车对其做了闪避处理。
上面提到,体验全程会经过三个红绿灯以及一次调头,在路经各个红绿灯路口时,车辆能够精确识别信号灯的颜色,红灯停绿灯行,中间没有出现误判。下图是掉头路口,该路口有一个掉头灯和一个直行灯,此时掉头绿灯亮,百度无人驾驶车在路口进行了掉头操作。掉头的过程稍微有些左右晃动,这可能是由于车辆在重新识别车道线,此时,司机(安全员)密切注视着方向盘和车辆动向,准备着随时接管车辆,不过后来车辆稳定下来,之后就比较平顺了。

在无人车车程的最后,是打右灯靠边停车, 此时有一个小细节,即可能百度并未为无人车输入“不能压实线行驶”的命令,百度无人车只顾着慢慢滑行、靠边停车,但是却错过了虚线,踩着实线靠边停车。这并不符合交通法规。当然了,这属于命令输入的问题,在实际演示中,这个并不是大问题。
百度无人驾驶车的技术路径
按照功能不同,我们将百度无人驾驶车的核心构成分为感知系统、车载计算中心和汽车大脑三部分,其核心构成如下:
感知系统 (Perception)
激光雷达: 64线的激光雷达 (LiDAR),在车辆行进的过程中,激光雷达360°不断旋转,采集车辆周围的环境数据,进行车辆自身定位及四周障碍物检测(120米)在车顶左右及后侧,是3个 16线激光雷达,对车身周边盲区障碍物检测。
高动态范围相机模组:位于车顶前方,共2个,可以精确识别红绿灯,路面交通线、各种交通标识,以及正前方障碍物。
毫米波雷达:可用于前方中长距障碍物检测,尤其是跟车时对前车车速及车距进行检测, 预判前车行为。
GPS/ IMU组合导航定位系统:(全球卫星定位系统 Global Positioning System;IMU 惯性导航装置Inertial Measurement Unit),可以和激光雷达组合,实现点云定位。
上述传感装置组成了无人车的感知系统,就好像人的眼睛一样,向无人车每时每刻输入周边外界信息。
车载计算中心 (Onboard Computing System)
百度利用自主研发的车载计算中心,使用CPU+GPU(图形处理器Graphics Processing Unit)+FPGA异构计算平台,可完成百度计算大脑感知、决策、规划、控制的全部计算。
汽车大脑
除了感知系统和车载计算中心,无人车最核心的部分是百度自主研发的汽车大脑,包括高精地图 (High Definition Map)、智能感知 (Intelligent Perception)、智能控制 (Intelligent Control)三大能力。
百度汽车大脑的核心,是基于高精地图和智能感知进行的智能控制。它能根据实时感知到的环境信息、高精地图数据,实现对于路径的最优规划,通过预测车辆、行人的行为和意图,做出合适路况的行车决策,从而控制无人车正常行驶。在这个过程中,汽车大脑不断学习人类的驾驶经验,不断提升自己的“智商”,以保证用户的自动驾驶体验。
如果要对百度的无人驾驶车有一个直观的了解,你还可以看看这一则在乌镇现场拍摄的视频:
我是36氪汽车记者,负责特斯拉、无人驾驶、新能源、车联网、出行及后市场,欢迎直接与我联系,微信:18701404010