【读书】如何像巫师一样隔空操作
编者按:本文摘选自《黑科技》,作者顾志强,36氪经授权发布。
说起雷达,人们一般会联想到巨型天线,或者各类军用的笨重装置,似乎和日常生活关系不大。然而2015年在谷歌I/O中亮相的Project Soli迷你雷达(图1),令人眼前一亮。该雷达可以捕捉手指的细微运动,隔空通过手势控制手表屏幕翻页,甚至通过变化手指与屏幕距离实时改变UI(用户界面)元素,好像巫师施展魔法一般。更有趣的是,该雷达芯片以及全部天线合成在一起也不过指甲般大小,这样的尺寸,使得它完全可以嵌入可穿戴设备以及其他各种微型装置中,其商业应用也让人充满了想象。说到雷达的应用,涵盖军事、科研、家居、娱乐等多个领域,各种新功能也是层出不穷,令人眼花缭乱叹为观止。本文将分几节跟大家详细聊聊雷达背后的原理及其商用前景。
雷达的前世今生
雷达,英文叫Radar(RAdio Detection And Ranging),其基本原理是利用发射“无线电磁波”得到反射波来探测目标物体的距离、角度和瞬时速度。雷达的雏形在自然界早已存在:比如蝙蝠或者海豚便是利用声音的反射波(也称声呐)定位。与声呐所不同的是,雷达使用的是电磁波。它不需要媒介的存在,就可以在真空中工作无阻。
19世纪中叶,麦克斯韦建立了电磁场方程,为整个无线通信以及雷达应用奠定了理论基础。该方程完整地描述了电场的变化如何导致磁场的变化,磁场的变化又如何导致电场的变化,从而产生了所谓电磁波概念。随后不久,赫兹就通过实验证实了电磁波的真实存在。1904年,Christian Huelsmeyer(见图2)首先提出将电磁波应用于雷达,利用电磁波反射来探测海面上的船只。1922年,无线电之父马可尼(Guglielmo Marchese Marconi)也将雷达的概念完整地表述了出来,他们都可以算作现代雷达的开山鼻祖。
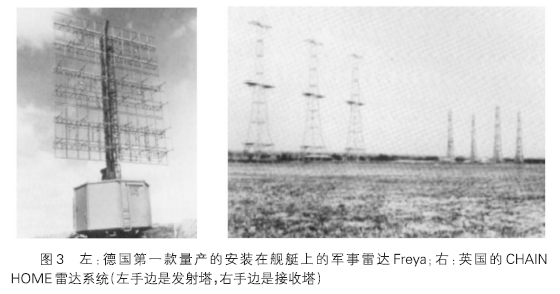
雷达技术真正突飞猛进,是在第二次世界大战时期。这个时期无论英美还是德国都在积极研制更精准的雷达用以实时定位对方的飞机船只。如图3所示,德国的Freya雷达以及英国的CHAIN HOME雷达阵列都是比较早期投入军事侦察的应用实例。这些军事雷达对于第二次世界大战的走势和战局都起到了关键性的作用。战争的较量,在很大程度上即是战争背后各国军事科技的较量。能够提前掌握对方的军事动态并且做出预判,从而有效干预,是战场上的制胜法宝之一,所谓知己知彼方能百战不殆。
二战后,原本只是用于发现和跟踪导弹的雷达就没有了太多用武之地。于是许多雷达技术就逐步从军用转为科研和民用。比如卫星遥感雷达、气象雷达、深空探测雷达、警察在高速公路旁经常使用的测速雷达、生命体征检测雷达、探地金属雷达、穿墙透视雷达等,甚至专门用来接收外星人讯号的雷达,不胜枚举,各类应用简直可以汇总成一个雷达“百货店”了(如图4和图5所示)。随着天线尺寸和芯片的极度缩小,在可预见的未来,更多的雷达设备将会以微型器件面世。就比如前文提到的Project Soli项目,它们能嵌入可穿戴设备,成为物联网的一类重要传感器。随着技术的普及,也将逐渐走入寻常百姓家,为人们的生活起居带来方便。这种改变是革命性的改变,原因在于雷达具有许多其他技术无法替代的功能。
雷达基本特性
相比于其他隔空检测或者体感技术,例如体感相机、超声波等,雷达有着一些天然优势:首先是稳定性强,无论白天黑夜、暴晒寒风,雷达皆可正常工作;其次是制造起来相对容易且硬件成本低;最后是功能强大,高频雷达测量物体距离通常可以精确到毫米级别;而低频雷达则可以做到“穿墙而过”,完全无视遮挡物的存在。这些特性让雷达,尤其是微型雷达,在未来都有着广阔的应用前景。
电磁波频段与选择
首先要解释的是电磁波频率本身。一般雷达工作的频段从3MHz到300GHz不等。不同频率的电磁波易受到大气环境的影响。大气中的水蒸气和氧是电磁波衰减的主要原因,当电磁波频率小于1GHz时,大气衰减可忽略。一般规律是:频率越高,传输损耗受天气影响越大。所以低频波段比较适合远距离物体探测,但是精度不高;高频波段定位精度较好,但是作用距离较短。需要按照不同应用场景来选择相应的频段。
就拿谷歌的Project Soli来说,它的中心频率选择在61.25GHz左右。如此选择的好处是该频率可以捕捉到细微的手指动作,精度可以达到mm(毫米)左右。但是由于低功率的需求,Project Soli的作用范围不超过1米。同时该频段(61~61.5GHz)属于ISM(Industrial, Scientific, and Medical)频段,不需要特殊执照就可以免费使用。关于频段的使用,各个国家都有着严格的规定,对于商业用途而言,购买某一个特殊频段的使用权通常要花费巨大资金参与竞标,动辄数十甚至上百亿美元。所以免费范围的ISM频段通常是商业雷达的第一选择。频段选择是一个非常复杂的话题,这里就不详细叙述了。有兴趣的朋友可以参考相关的规定,比如美国的FCC Regulations(联邦通信规则)。
透视眼与多路径效应
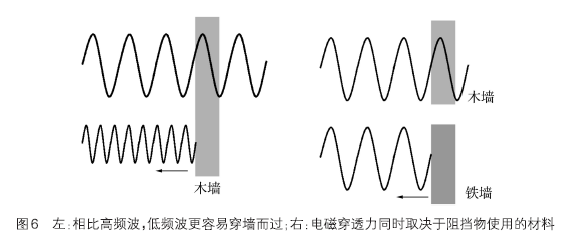
很多人认为雷达可以轻易地越过障碍物,穿透云层、墙壁和人体。这点并不完全正确。雷达是否能穿墙隔空探测物体,取决于墙本身的材料以及雷达频率的选择。首先是频率:3GHz的电磁波能穿透10cm厚的墙,而60GHz雷达如Project Soli雷达恐怕连一张薄薄的纸都无法穿透。此外墙本身的材料也很重要,同样是10cm厚的墙,如果是一般的土砖或者木头制成的,就很容易穿过,而铁墙就难以逾越(如图6所示)。
天线与发射信号图样
一般电磁波是以球面波或者至少在某一个平面上均匀地向外辐射出去的(omnidirectional),这对于一般通信而言是极好的,因为它可以保证通信在各个方向上都畅通无阻。然而对于雷达的特定功能来说就显得不够了,通常雷达需要能够将电磁波朝某个方向上发射出去,这样才能“有的放矢”。而这就需要特殊的有向天线设计了。
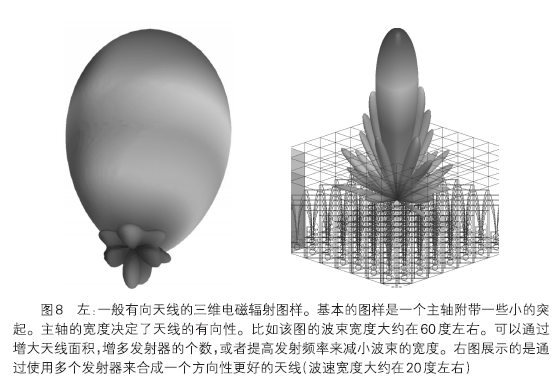
在给定发射频率情况下,天线的有向性(即波束发散角度)同天线的面积成反比。这也就能解释为什么深空探测的雷达天线要做得那么大。天线设计本身是一门非常精深的学问,我们这里的介绍只是抛砖引玉。值得一提的是,一般的有向电磁波发射的图样长得如图8所示。它通常有一个突起的主轴(main lobe)和周围的一些小突起(side lobe)。主轴的宽度决定了天线的波束宽度,而周围的小突起则一般作为噪音来处理。
雷达的组成
雷达一般由发射器、接收器、发射/接收天线、信号处理单元,以及终端设备组成。发射器通过天线将经过调频或调幅的电磁波发射出去;部分电磁波触碰物体后被反射回接收器,这就好比声音碰到墙壁被反射回来一样。信号处理单元分析接收到的信号并从中提取有用的信息,诸如物体的距离、角度以及行进速度,这些结果最终被实时地显示在终端设备上。传统的军事雷达还常配有机械控制的旋转装置用以调整天线的朝向,而新型雷达则更多通过电子方式做调整。
为节省材料和空间,通常发射器和接收器共享同一个天线,方法是交替开关发射或接收器避免冲突。终端设备通常是一个可以显示物体位置的屏幕,但在迷你雷达的应用中,更多是将雷达提取的物理信息作为输入信号传送给诸如手表等电子设备。信号处理单元才是雷达真正的创意和灵魂所在,主要利用数学物理分析以及计算机算法对雷达信号做过滤、筛选,并计算出物体的方位。在这基础之上,还可以利用前沿的机器学习算法对捕捉到的信号做体感手势识别等。
测距与测速
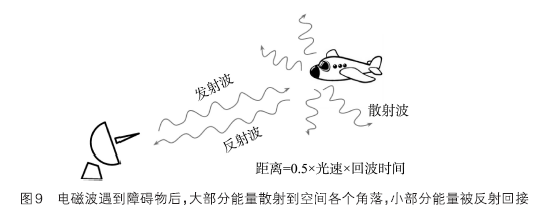
目前雷达的基本功能仍然是测距和测速。例如警察执法中通常会使用测速雷达来判断车辆是否超速。测距和测速背后的基本原理并不难理解。就拿测距来说吧,最简单的做法就是发射一个脉冲波,并等待其返回接收器。因为电磁波是以光速行进的,那么通过测量等待时间就可以间接地获取距离啦(如图9所示),是不是很简单呢?
手势识别
前面所讲的测距或者测速都把物体想象成一个抽象的点。而真实的物体,如人的手则可以认为是一堆三维点的集合体。将雷达用于近距离识别各类手势是一个较新的研究领域。在这之前很多人都尝试过使用相机来做手势识别,问题是相机成本较高,需要一个较好的镜头才有可能实现,同时耗电量较大,并不适合放置在可穿戴设备上。而微型雷达在理论上可以做到低功耗、低成本,镜头也不会突兀在设备外面。
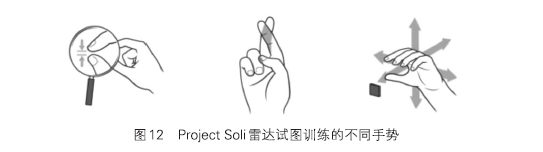
从Project Soli公开的资料来看,它主要是通过分析雷达反射信号在时间轴上的变化来区分不同的手势,这些手势可以是微小的手指舒张缩放、手掌的张开合拢,或者是手指的前后位置摆放。一些比较自然的手势参见图12。
相位阵列与定位
除了简单的手势识别之外,雷达还可以用来定位。无论测距、测速,或者手势识别,都不能精准地指出物体所在的三维位置。要实现定位也不难,最简单粗暴的做法就是利用一个有向天线和一个机械旋转装置,通过不停地旋转天线来扫描天空的各个位置。
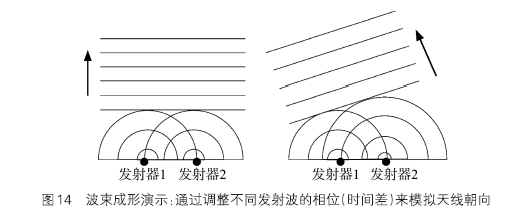
这种通过机械方式旋转天线的方法,对于移动产品来说显得很笨重,耗电量大且不方便。一个聪明又有趣的解决办法是通过“相位阵列”以电子的方式调控天线的合成方向,也被称为波束成形。其主要原理是使用多个发射器,通过调整波形的相位和波形间的相长和相消干涉(constructive and destructive interference),来控制合成发射波的朝向。更简单地说,就是“打时间差”。为便于理解,不妨想象一下水波之间的干涉条纹(如图14所示)。如果可以自由任性地调整天线朝向,再配合上测距的原理,雷达就可以实现自动定位啦!
雷达的其他各类神奇应用
照妖镜
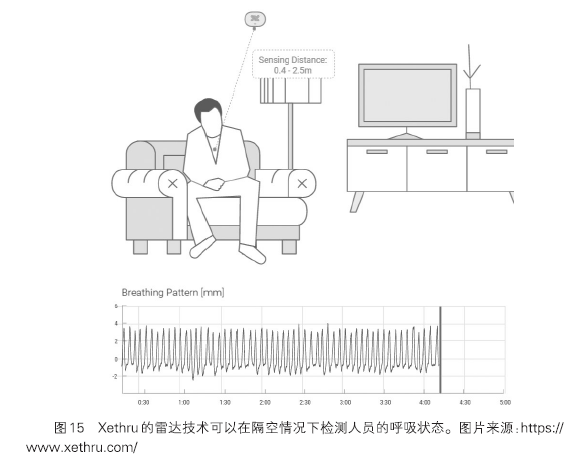
Xethru公司提供的利用雷达隔空探测呼吸节律的方法,和Project Soli雷达有着本质的不同。Xethru雷达基于的是超宽频技术,而Soli雷达使用的是窄频技术。超宽频雷达通过发送与接收非常短的脉冲,可以探测极其细微的动作。一般而言,雷达能够感知的动作细微度与使用的带宽成反比,Xethru使用的3.1~10.6GHz的频段,将感知精度又带入了一个新的层次。该频段的电磁波可以轻易穿透墙壁或者衣服,甚至可以隔空检测人的心跳。假想不久的将来,警察局里将用上新型雷达测谎仪,隔空测心跳来判断嫌疑犯是不是在撒谎;相亲派对上的技术宅男们,也能通过雷达判断对面的美女是不是对其有意而“怦然心动”,采取行动猛烈追求……目前Xethru的最大问题是如何在人移动的情况下检测呼吸状况。根据笔者推算,它目前的应用场景可能还是在假定人在静止不动的情况下。当然,即使如此也不错了,至少可以做到像巫师的“照妖镜”,隔空区分“是人是妖”吧。
掘金机
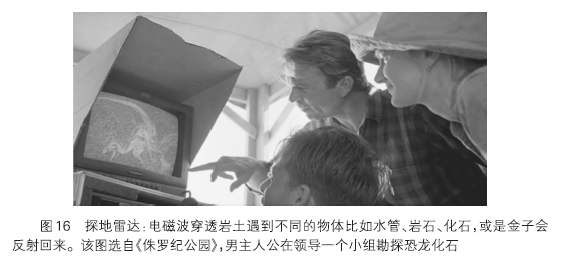
探地雷达也是一项很有意思的发明,它可以利用电磁波穿透土壤的特性,窥探泥土底下隐藏着什么不可告人的秘密,电影《侏罗纪公园》中就有这样一个应用场景(如图16所示)。除了发现地底下的管道、化石,据说还有人发现了金子哦!如果你家里有一个小院子,不妨试试看,说不定有惊喜。