从「L2 无法升级至L4+」说起,为什么我要站特斯拉的自动驾驶策略

当今自动驾驶领域风头正劲的两家企业谷歌&特斯拉,在自动驾驶研发策略是存在巨大分歧的。4月20日,前谷歌无人车项目CTO Chris Urmson发表演讲公开力挺老东家diss特斯拉,声称特斯拉「从L2 逐级升级到L4+」的自动驾驶研发策略是行不通的。
Chris Urmson自2009年2月起开始在谷歌研发自动驾驶技术,从时间节点上看,Urmson算是谷歌无人车项目的创始成员之一,他在2013年接替Sebastian Thrun开始担任CTO,统领所有研发工作。去年年底他与Uber无人驾驶Leader Drew Bagnell、特斯拉Autopilot负责人Sterling Anderson成立了自动驾驶创业公司Aurora Innovation,算是自动驾驶领域少有的长期行业观察者与顶级一线研发专家。
先开卖配备自动驾驶硬件的汽车,后续软件层面研发落地后再推送给车主。特斯拉管理层从未在公开场合提到过「从L2 逐级升级到L4+」的研发策略,但毫无疑问是这一路线的坚定支持者和践行者。
比如说,2016年10月,特斯拉宣布搭载Autopilot 2.0硬件的自动驾驶车型开始量产,车主可以购买全自动驾驶选装包,待特斯拉将L4+技术研发落地后即推送给车主。而车主现阶段购买即可体验的是「增强版自动辅助驾驶」选装包,也就是相当于L2.5级别的自动驾驶技术。
Urmson在演讲中提到了一个观点:从 SAE Level 2逐步升级到 SAE Level 4+的技术路线是行不通的,原因在下图中——
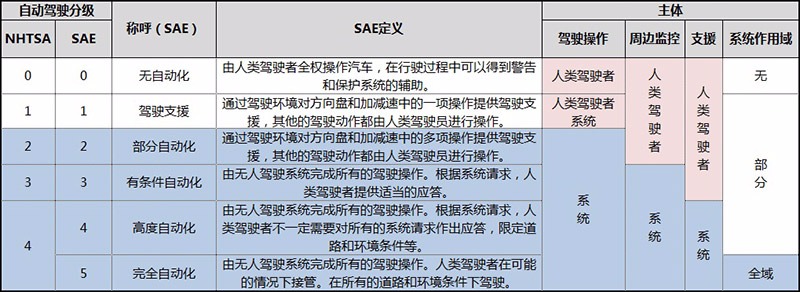
可以看到主体一栏,从L0-L5,人类的作用越来越少,其中L4/5部分的驾驶操作、周边监控及支援(即应答)全部交由自动驾驶系统,而L3及以下有很多工作需要人类完成,这就给「从L2 逐级升级到L4+」带来了问题,举个例子:L2/3自动驾驶汽车出现突发路况时设计逻辑是「交由人类处理」,而L4/5则是「系统自行处理」。这只是相对粗浅的一个例子,背后暴露出的是两种状态下的系统的应对逻辑、实时反应速度等方面的巨大差异。简单点说,L4+的系统比L3及以下的系统要“聪明”得多,很多L3及以下适用的设计原则在L4+需要重新设计,两者在技术难度上有巨大而难以逾越的鸿沟。
这是谷歌从技术角度选择一步到位直接研发L4+技术的理由,不过这并不是唯一理由。
如果你有注意的话,谷歌早期路测改装的雷克萨斯RX自动驾驶汽车,是带有方向盘的,在系统自己跑的时候,驾驶员会暗中观察,并在意外突发时立刻接管,避免车祸。随着技术水平的提高,这份工作变得越来越乏味。2016年谷歌的自动驾驶汽车做到了系统平均每跑5000英里(约8000公里)才需要人为接管一次,这种情况下驾驶员在“陪”系统路测的时候很容易走神、犯困甚至睡着。也就是说在这个问题上,人类是「不可信任」的,所以后来谷歌自主研发的“豌豆荚”自动驾驶汽车是没有方向盘的——系统自行处理所有突发状况。
这是谷歌路线的另一个理由,从安全的角度考虑。

谷歌雷克萨斯RX自动驾驶汽车

谷歌自主研发的“豌豆荚”自动驾驶汽车没有方向盘
如果直接将未达L4+的技术下放到在量产车型上,可能会酿成车祸人亡的惨剧。特斯拉这样做了,所以2016年5月,美国俄亥俄州一个名叫Joshua Brown的特斯拉车主,把L2当成L4用,行车途中睡着,最终撞上重型卡车导致车祸人亡。
特斯拉不加限制的让用户使用L2自动驾驶酿成惨剧是错的,但并不代表谷歌一步到位L4+就是最好的方案。
Elon Musk在车祸发生后特斯拉饱受质疑时这么回应:
我们目前的自动辅助驾驶已经被证明能提供比手动驾驶更好的安全性,在道路致死率上面是世界平均水平的1/3。即便是退一万步来讲,我们的系统只比人工好1%,那么一年车祸导致的120万人里面,我们也能拯救1万2千人。所以我觉得如果你有这样一个提高安全的技术,仅仅因为怕舆论或者法律起诉就雪藏起来,这在道德上是错误的。
特斯拉很快从惨剧中吸取教训,做出改进。比如特斯拉新发布的Model 3配备了面向驾驶员的摄像头,鉴于Model 3尚未大规模交付,所以特斯拉未能推送更新说明摄像头的作用,但从新款凯迪拉克CT6、奥迪A8等车型的惯例做法来看,这个摄像头大概率是用来“监视”汽车自动驾驶状态下驾驶员的注意力集中程度,防止出现突发状况时驾驶员无法及时应答。

提高安全性是推动L2/3应用在量产车型上的第一理由,除此之外,从竞争的角度看,特斯拉这么做也是势在必行的。
从去年10月算起,到今年年底,保守估计跑在全球各地的特斯拉Autopilot 2.0硬件车型可轻松达到10万辆级别,这是全球最大规模的自动驾驶路测车队。谷歌Waymo的自动驾驶车队到今年年底可达600辆,路测里程乐观估计应该能到400万英里。特斯拉Autopilot 2.0硬件车型上的摄像头和雷达已经于今年早些时候开始在后台收集路测数据,车主购买自动驾驶选装包与否,都不妨碍这些传感器在后台高速运转并将数据传回公司。谷歌如今排名第一的技术水平是从300多万英里的路测过程中刷coener case刷出来的。如果特斯拉启用10万级别的车队展开竞争,谷歌的优势还能保持多久?
另外一个问题是,极端案例出现的频率到底有多低?可能每10万英里才出现一例,可能更低频。所以穷尽各种极端案例是一项道阻且长的工作,Musk此前说要实现L4级别的自动驾驶技术,大概需要100亿英里的路测数据。这只是一个估算数据,可能更少,可能更多,无论是10亿英里或1000亿英里,从竞争的角度看,尽可能快的跑数据都是必要的。
谷歌也深知自己养车队跑数据,前期投入太重资产,起量也太慢了。所以除去实打实的美国各地300万+的路测数据,截至去年年底,谷歌还在自家计算机数据中心模拟跑了10亿英里的路测里程。跟菲亚特克莱斯勒和本田的合作也在加速,都是为了路测数据尽快起量。
也有像英特尔-Mobileye-宝马联盟、百度阿波罗这样的联盟式打法,都是寄希望于大家共享数据,共同提升自动驾驶能力。所以百度副总裁邬学斌昨天在2017 中国汽车产业发展(泰达)国际论坛说“数据从哪来?数据一定是众人拾柴火焰高,百度希望就是大家都来阿波罗社区,并贡献数据。”这种联盟式打法的主要问题是项目推进动作太慢,远没有自家公司内部协作高效,百度就不说了,英特尔-Mobileye-宝马联盟去年7月成立,今年年底才准备上100辆自动驾驶汽车,还不如谷歌呢。
对特斯拉来说,挑战在于全球范围内这种联盟还挺多的,只要有一个联盟完成所有研发工作开始推进量产,对特斯拉的威胁就很大——任何一家传统车企在汽车制造和量产方面相对特斯拉都有绝对的优势。
从这个角度看去年卖了7.6万辆车的特斯拉2018年目标卖50万辆就更容易理解,这是竞争的需要,除了电动汽车,也是自动驾驶领域的竞争。
我是36氪汽车小组记者郑晓康,关注特斯拉、无人驾驶、新能源车、车联网、出行及后市场,欢迎直接与我联系,微信:15735104947